泊位的船舶行为
加速度

可以测量船舶受到海浪震动时施加在船体上的振动、振动和冲击,以及船舶抛锚时发动机的振动。它表明即使在船舶抛锚时,也从前、后、左、右、上和下施加了轻微的加速度。
角速度

它可以测量由波浪引起的滚动和俯仰运动引起的旋转速度。可以看到,波的周期用角速度表示。
姿态角

可以测量船体的倾斜度。与角速度一样,可以看出船体结合波浪周期有规律地前后左右倾斜。
GNAS 运动传感器GSM-MG200在血管运动测量上的运用
通过在船上安装 GNAS 运动传感器,您可以轻松测量船体的滚动、俯仰和偏航。
由于它与 GPS 位置信息和速度信息相关联,因此可以通过将摇晃的位置和速度联系起来进行测量。
配备3轴加速度传感器,可测量起伏、摇摆、涌动等特性。(*水平移动的绝对量不能直接测量。)通过长时间测量,可以测量振动的周期。
通过记录 GNAS 运动传感器的输出数据,可以长时间记录船舶的运动。以后可以分析发生故障时船舶的行为。

像船左右倾斜一样摇摆

岩石像来回倾斜的船

像船一样左右摇摆

整艘船摇摇晃晃,仿佛上下移动

整艘船左右摇晃

整艘船前后晃动
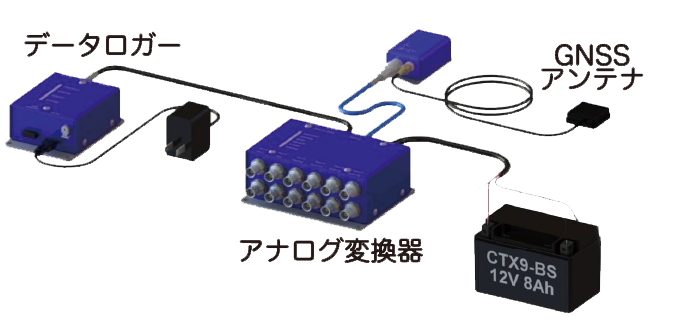
通过将 GNAS 运动传感器连接到模拟转换器,可以与其他已安装传感器的模拟信号同步测量。
电源可使用 12V 电池供电。结合数据记录器,无需 PC 即可进行长期记录。
可以测量船舶受到海浪震动时施加在船体上的振动、振动和冲击,以及船舶抛锚时发动机的振动。它表明即使在船舶抛锚时,也从前、后、左、右、上和下施加了轻微的加速度。
它可以测量由波浪引起的滚动和俯仰运动引起的旋转速度。可以看到,波的周期用角速度表示。
可以测量船体的倾斜度。与角速度一样,可以看出船体结合波浪周期有规律地前后左右倾斜。

可以看出左右都施加了比较大的加速度。此外,可以看出在转弯时向船体左侧施加了离心力,转弯后又恢复了原来的运动。

可以看到它在左右摇摆的同时航行,以恒定的转速转弯,在转弯时前后左右摇晃不多,转弯后又左右摇晃。

虽然它是水平航行,纵向几乎没有倾斜,但可以看到它有规律地左右摆动。转弯时,左右倾斜减小,转弯后,船在再次左右倾斜的同时航行。
