客户咨询热线:
18922517093
sinto 6轴力传感器的应用实例
机器人具有受力感,并根据与产品和夹具接触引起的反作用力控制机器人的手臂。
即使对于过去难以自动化的任务,例如模仿不规则表面,力传感器ZYXer也可用于实现机器人的自动化。
薄而软的FPC(柔性印刷板)也通过精细的力检测可靠地插入。 它通过提供轻微力变化的高速反馈来控制自动化。
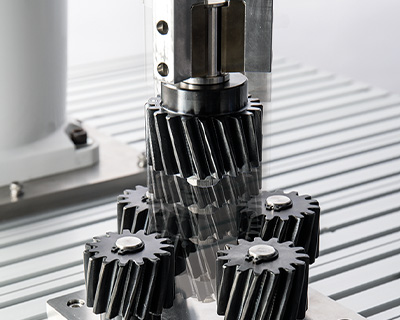
高分辨率可检测施加到齿轮上的小力数据。 快速自动位置校正,实现高精度相位对准。
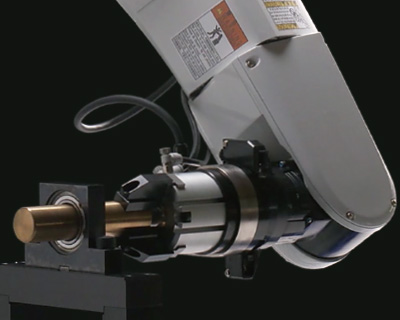
自动位置校正,快速响应,实现H7/f7配接。 它还可以补偿仅通过机器人位置控制±0.02mm偏差。
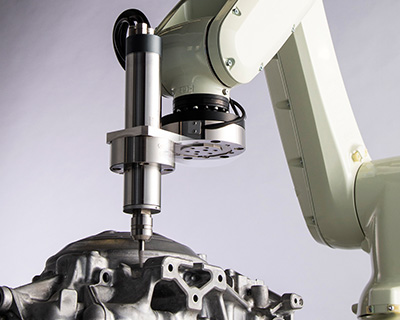
检测负载变化产生的残留毛刺,并确保可靠的光洁度。 在跟踪产品形状的同时,它会检测由于毛刺引起的负载变化。
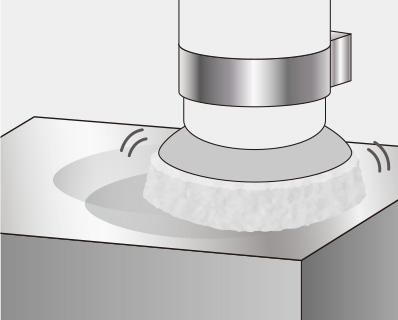
通过保持目标表面和喷嘴之间的距离恒定并遵循表面形状,可以实现美丽的光洁度。
检测操作员的力并控制驱动器。 即使在移动重型设备时,它也有助于移动并减轻负担。
跟随抛光表面的不平整,用一定的力进行抛光。
在不损坏产品或手的情况下进行拣选。
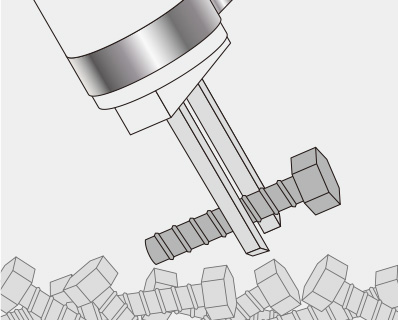
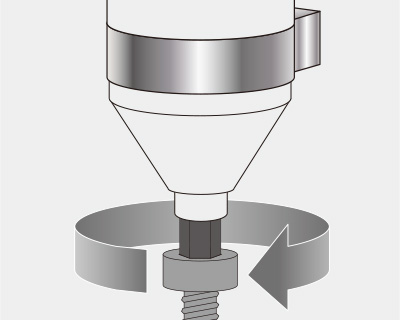
以所需的扭矩进行精确的螺钉拧紧。
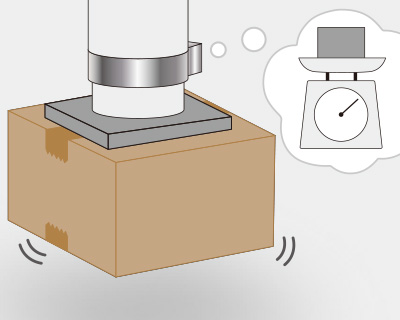
在握住机器人时,可以测量重量和重心。
| 型号 | 大小 | 安装尺寸 | 额定容量 | 允许的过载 | 质量 | 阀体材料 | 下载 | ||
|---|---|---|---|---|---|---|---|---|---|
| 工具侧 | 机器人侧 | Fx Fy Fz | Mx 我的 Mz | ||||||
| ZYX080A501Z | Φ80 x 高25 | 3xM6 P.C.D.21 |
4xM6 P.C.D.63 |
± 500N | ± 20Nm | ± 500% R.C.※1 | 约320g | 铝合金 | 2D CAD/3DAD/规格 |
| ZYX080A501 | Φ80 x 高22 | 3xM6 P.C.D.21 |
4xM6 P.C.D.63 |
± 500N | ± 20Nm | ± 200% RC | 约280g | 铝合金 | 2D CAD/3DAD/规格 |
| ZYX080S102 | 3xM8 P.C.D.20 |
4xM6 P.C.D.63 |
± 1,000N | ± 40Nm | ± 500% RC | 约650g | 不锈的 | 2D CAD/3DAD/规格 | |
| ZYX100A102 | Φ100 x 高30 | 6xM8 P.C.D.32 |
6xM8 P.C.D.80 |
± 1,000N | ± 45Nm | 约500g | 铝合金 | 2D CAD/3DAD/规格 | |
| ZYX100S202 | ± 2,000N | ± 100Nm | 约1.4公斤 | 不锈的 | 2D CAD/3DAD/规格 | ||||
| ZYX125A102 | Φ125 x 高30 | 6xM8 P.C.D.46 |
6xM8 P.C.D.100 |
± 1,000N | ± 75Nm | 约850g | 铝合金 | 2D CAD/3DAD/规格 | |
| ZYX125S202 | ± 2,000N | ± 200Nm | 约2.4公斤 | 不锈的 | 2D CAD/3DAD/规格 | ||||
| ZYX160A302 | Φ160 x 高35 | 6xM10 P.C.D.63 |
6xM10 P.C.D.125 |
± 3,000N | ± 120Nm | 约1.6公斤 | 铝合金 | 2D CAD/3DAD/规格 | |
| ZYX160S402 | ± 4,000N | ± 320Nm | 约4.5公斤 | 不锈的 | 2D CAD/3DAD/规格 | ||||
| ZYX200A352 | Φ200 x 高40 | 6xM10 P.C.D.80 |
6xM10 P.C.D.160 |
± 3,500N | ± 260Nm | 约2.6公斤 | 铝合金 | 2D CAD/3DAD/规格 | |
| ZYX200S902 | ± 9,000N | ± 600Nm | 约7.3公斤 | 不锈的 | 2D CAD/3DAD/规格 | ||||