客户咨询热线:
18922517093
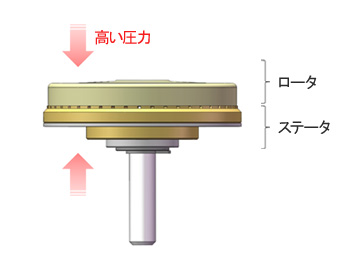
施加到转子和定子上的力的图像
超声波电机通过向压电陶瓷施加电压而使其变形,并且该变形被定子金属放大并传播,导致定子金属的表面变形为波状形状。该波的峰值作为行波移动,导致与定子接触的转子由于摩擦力而旋转。
由于转子和定子之间施加高压,因此停止时最大的摩擦力是超声波电机的保持力。
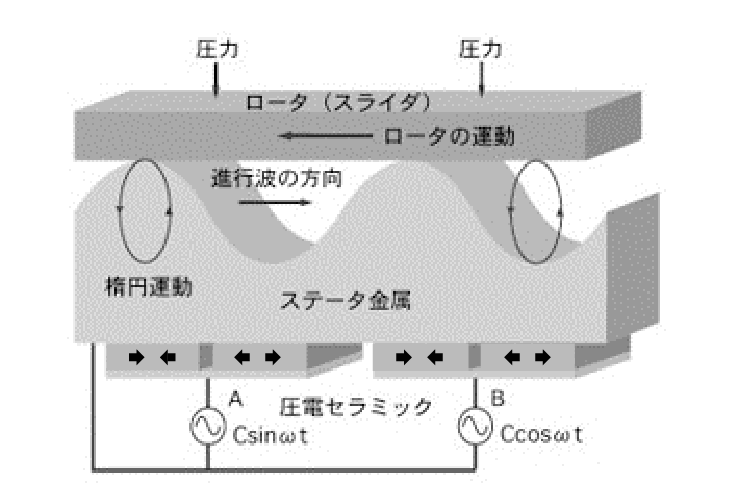
转子旋转原理图
通过向压电陶瓷施加电压,压电陶瓷发生变形和扭曲,并且这种变形被定子金属放大并传播,在定子金属的表面上产生行波。
这里,定子金属仅在表面行波的每个顶点处接触转子,并且每个顶点以椭圆运动运动。
转子在其椭圆运动的影响下旋转。
这种椭圆运动的轨迹与行波传播的方向相反,受其影响的转子也沿与行波相反的方向旋转。
换句话说,当行波绕定子圆周顺时针 (CW) 传播时,接触转子的行波的每个顶点都会经历逆时针 (CCW) 椭圆运动。
与波峰接触的转子沿与椭圆运动相同的方向逆时针 (CCW) 旋转。
通过控制该行波的速度和方向,可以在CW和CCW方向之间切换,实现超声波电机的高响应性。
Shinsei Kogyo的超声波马达:USR系列具有小型、低速、高扭矩、并具有优异的响应性和安静性。此外,由于它在未通电时具有较高的保持力,因此可以构建总重量较轻的运动部件,而无需齿轮或其他减速器。
超声波电机不使用线圈或磁铁的电磁力作为驱动力,并且不受磁力的影响。
另外,由于旋转时不产生磁性,因此可以在MRI或超导实验设备附近等强磁场环境中安全使用。
超声波电机目前有着广泛的应用。
| ・相机自动对焦 | ・测量仪器控制单元 |
| ・光学设备透镜镜的驱动装置 | ・接收人造卫星信号的设备的定位 |
| ・工业机器人用夹持装置 | ・卷帘自动控制装置 |
| ・输送零件的进给装置 | ・MRI测量仪器的姿势控制 |
| ・高磁场环境下的执行器 |
超声波电机的特点是转速低,每分钟几十到几百转,扭矩大。
无需齿轮或其他减速机构即可直接驱动,从而可以构建零齿隙的运动部件。
即使电源关闭,超声波电机也会因摩擦力而保持较高的保持力。
因此,超声波电机不需要制动器或离合器,从而可以构建没有电磁制动器或离合器的轻量化系统。
转子的惯性小,转子与定子之间的摩擦产生的制动力大,因此在停止时表现出优异的响应性。
速度控制也是无级的,机械时间常数小于1[ms],提供优异的可控性。
因此,高精度的速度和位置控制是可能的。
超声波电机不产生电磁波,因为它们不使用绕组或磁铁。
特别是非磁型超声波电机不使用任何磁性材料,因此在强磁场环境下也能稳定运行,不受磁性的影响。
与使用电磁力且具有相同扭矩的电机相比,它们更小、更薄且重量仅为其一小部分。
通过将其用作多关节机器人的手臂和腿部的执行器,可以减轻各关节的重量。
因此,我们可以期待机器人和整个系统的响应能力和有效负载的提高。
用于驱动的振动在听不见的范围内,因此运行噪音非常安静。
此外,通过不使用齿轮,可以避免驱动单元发出的噪音。
